-
Jiawen Gong authoredJiawen Gong authored

- 09 SOFT ROBOTICS
- INSPIRATION
- INFLATABLES
- HEATPRESSING VINYL
- 1ST SAMPLE
- 2ND SAMPLE
- BAKING PAPER ORIGAMI
- INSPIRATION
- 1ST SAMPLE
- 2nd SAMPLE
- LASERCUTTING TPU
- 1ST SAMPLE
- 2ND SAMPLE
- 3RD SAMPLE
- 4TH SAMPLE
- 5TH SAMPLE
- FAILED SAMPLE
- SOFT ROBOTICS
- SILICON GRIPPER
- GELATIN GRIPPER
- FLOWER GRIPPER
- FABRICATION FILES
09 SOFT ROBOTICS
INSPIRATION
INFLATABLES
How do they work?
“The majority of inflatable structures are made up of an air cavity wall and roof. The structure is inflated and supported by a constant supply of air which is drawn from an integral fan with constant power. The air is drawn in from outside of the structure with a centrifugal fan. The fan sits in line with the structure and produces the airflow and pressure needed to lift the inflatable pod, cube or dome. The structure is made out of segments or panels which are sewn together with stitching and seams. These seams allow the structure to not over inflate as they continually leak through the hundreds of thousands of stitching holes created through the sewing. Internal ribs or straps allow the structure to form the shape of the structure. There are 2 membranes to an inflatable structure, an inner and an outer, the outer membrane surface is exposed to the outdoor or exterior environment and the inner membrane surface is exposed to the activity and people inside the structure. Air passed between these two membranes or air cavity walls and roof then escapes through the extremely small holes of the sewing or stitching. The air loss through the permeability of the material itself is limited by the addition of a PU (polyurethane) coating on the reverse of the material. Without this coated backing, the structure would not withhold enough air pressure to inflate and keep the structure inflated.”
From How do inflatable structures work?
HEATPRESSING VINYL
1ST SAMPLE

2ND SAMPLE

BAKING PAPER ORIGAMI
INSPIRATION
1ST SAMPLE
2nd SAMPLE
LASERCUTTING TPU
1ST SAMPLE

You can download the fabrication file here 1.
2ND SAMPLE


You can download the fabrication file here 2.
3RD SAMPLE
You can download the fabrication file here 3.
4TH SAMPLE
You can download the fabrication file here 3.
5TH SAMPLE

You can download the fabrication file here 4.
FAILED SAMPLE

You can download the fabrication file here 5.
SOFT ROBOTICS
We used the PLA mold for the griping actuator from the lab. We used this model to print the mold.

SILICON GRIPPER


GELATIN GRIPPER

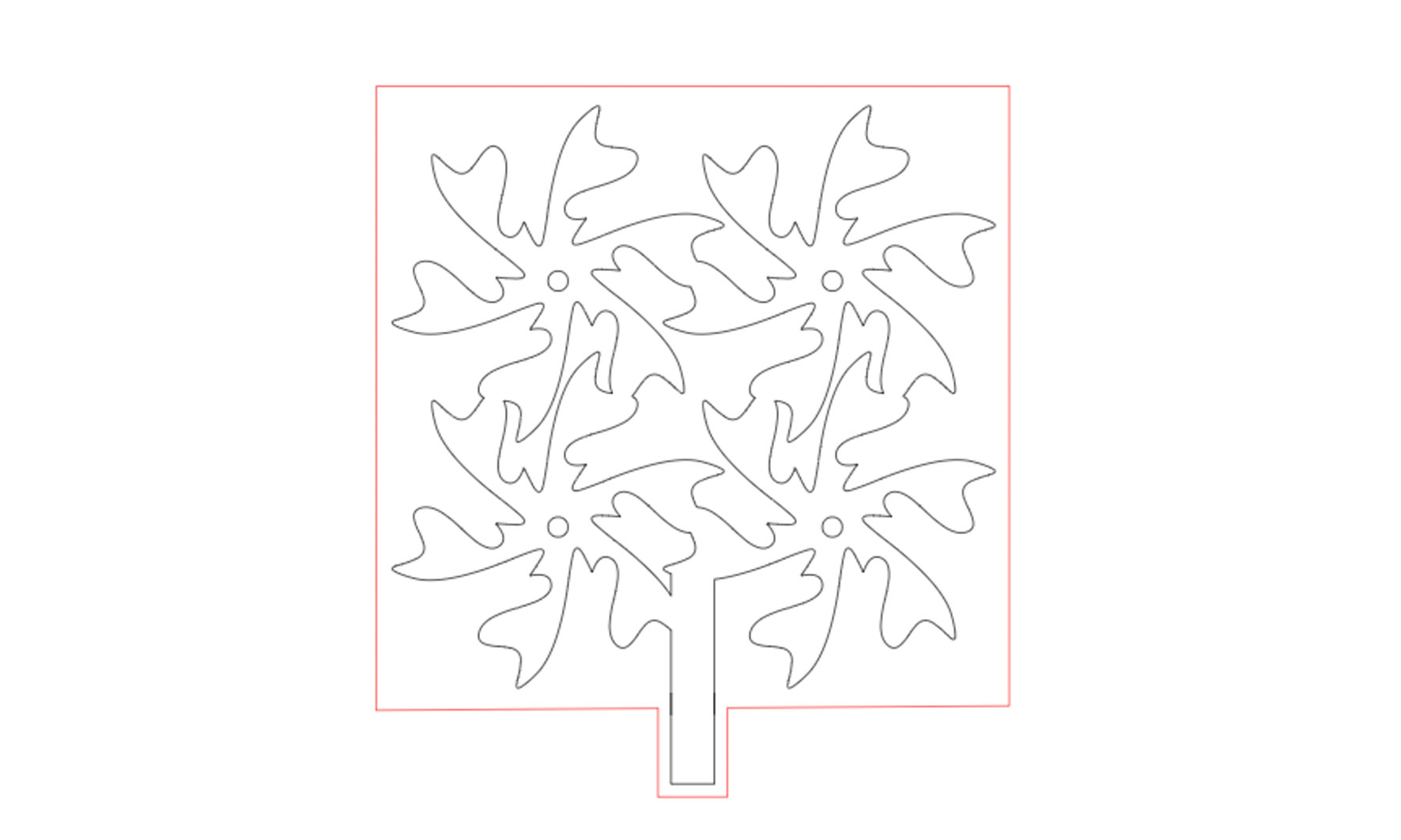
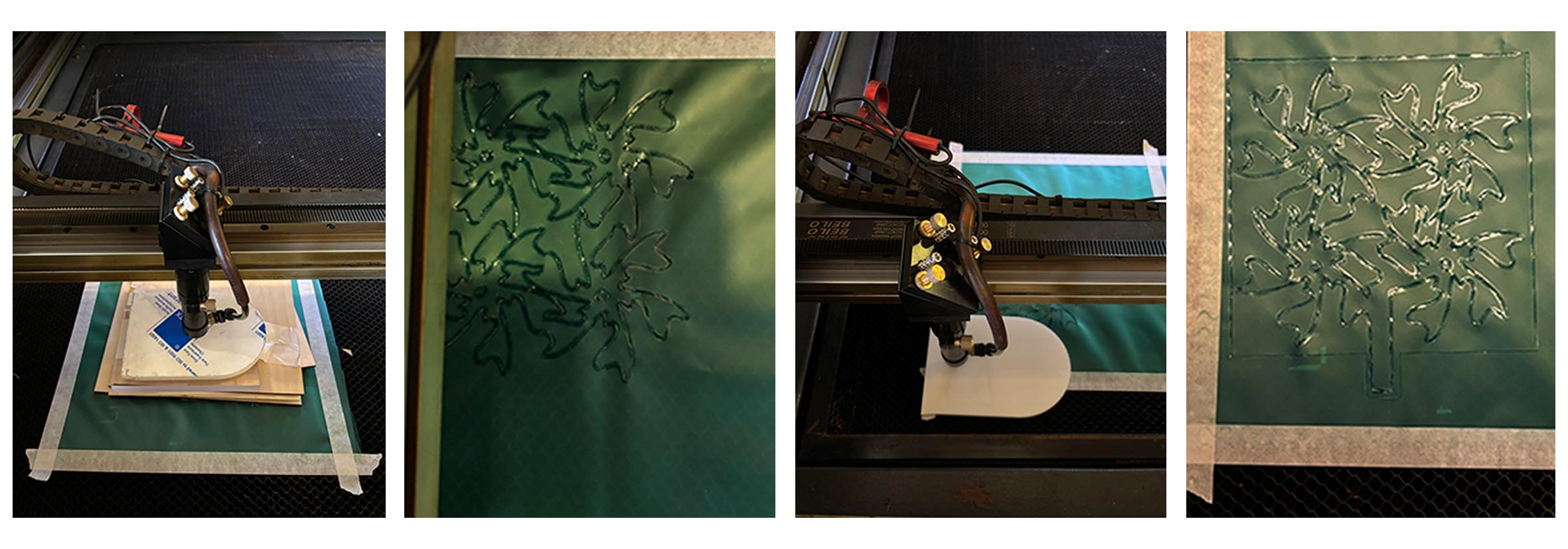
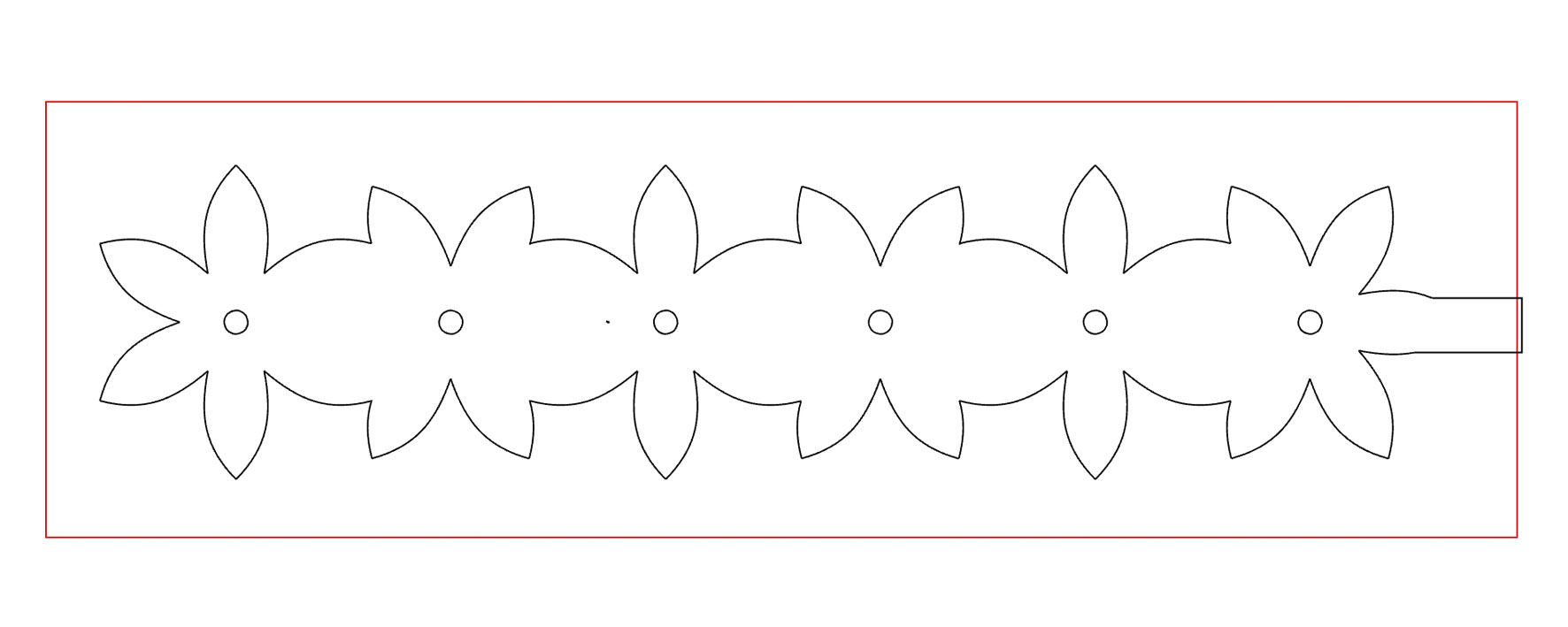
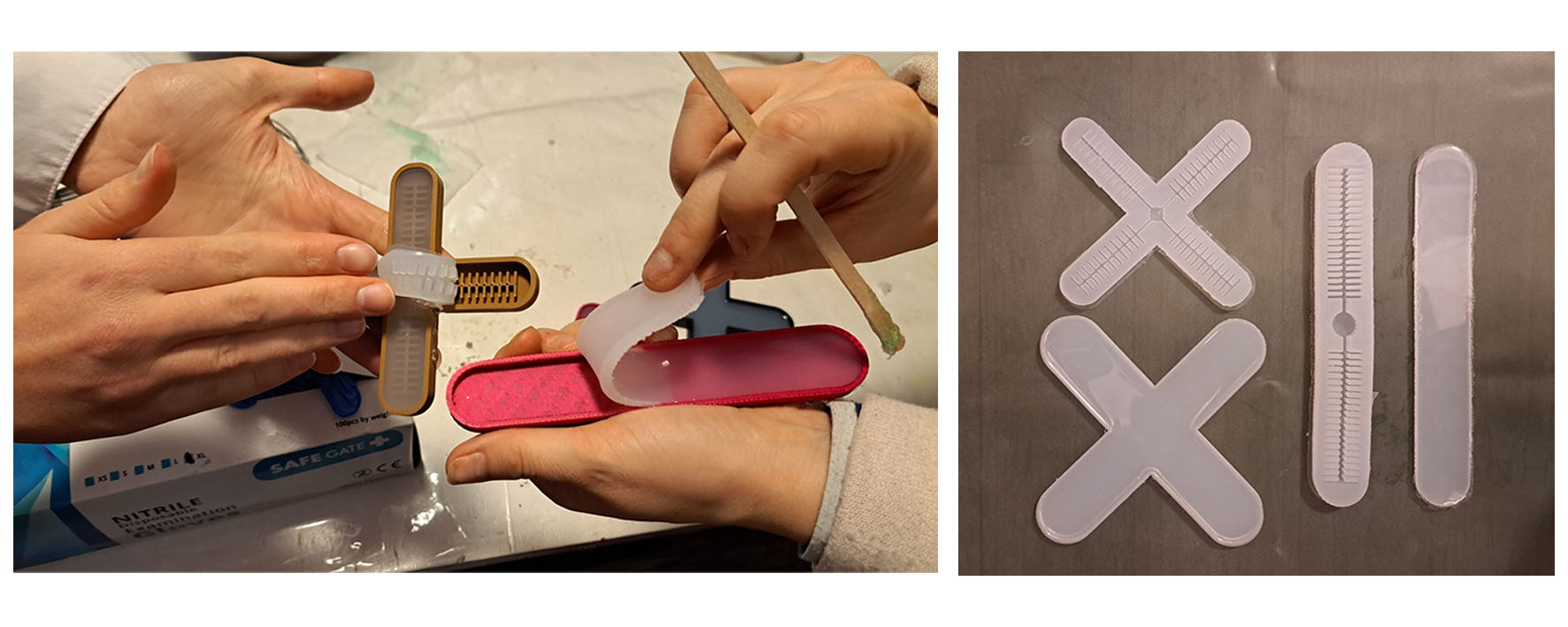
FLOWER GRIPPER





You can download the fabrication file here 6.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}