
add test stepper
Showing
- docs/Instruction/images/stepper/42SHD4002-24B.jpg 0 additions, 0 deletionsdocs/Instruction/images/stepper/42SHD4002-24B.jpg
- docs/Instruction/images/stepper/42SHD_spec.png 0 additions, 0 deletionsdocs/Instruction/images/stepper/42SHD_spec.png
- docs/Instruction/images/stepper/42SHD_wire.png 0 additions, 0 deletionsdocs/Instruction/images/stepper/42SHD_wire.png
- docs/Instruction/images/stepper/TMC2208_back.jpg 0 additions, 0 deletionsdocs/Instruction/images/stepper/TMC2208_back.jpg
- docs/Instruction/images/stepper/TMC2208_front.jpg 0 additions, 0 deletionsdocs/Instruction/images/stepper/TMC2208_front.jpg
- docs/Instruction/images/stepper/arduino_tmc2208_lib.png 0 additions, 0 deletionsdocs/Instruction/images/stepper/arduino_tmc2208_lib.png
- docs/Instruction/images/stepper/mode_select.jpg 0 additions, 0 deletionsdocs/Instruction/images/stepper/mode_select.jpg
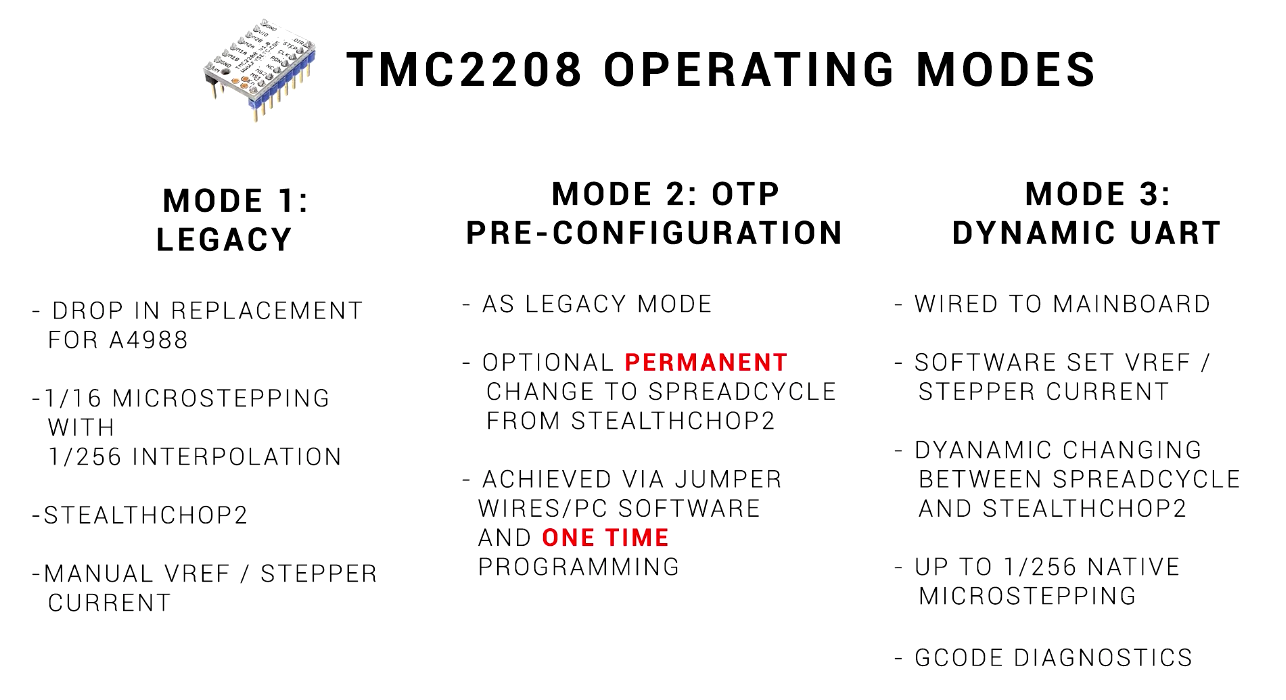
- docs/Instruction/images/stepper/modes.png 0 additions, 0 deletionsdocs/Instruction/images/stepper/modes.png
- docs/Instruction/images/stepper/vref_hole.jpg 0 additions, 0 deletionsdocs/Instruction/images/stepper/vref_hole.jpg
- docs/Instruction/images/stepper/vref_screw.jpg 0 additions, 0 deletionsdocs/Instruction/images/stepper/vref_screw.jpg
- docs/Instruction/tips/stepper_TMC2208.md 113 additions, 0 deletionsdocs/Instruction/tips/stepper_TMC2208.md
{kind=link}
18 KiB
{kind=link}

112 KiB
{kind=link}

48.4 KiB
{kind=link}

108 KiB
{kind=link}

201 KiB
{kind=link}

437 KiB
{kind=link}

216 KiB
docs/Instruction/images/stepper/modes.png
0 → 100644
{kind=link}
169 KiB
{kind=link}

302 KiB
{kind=link}

277 KiB
docs/Instruction/tips/stepper_TMC2208.md
0 → 100644